海尔KFR-25GWx2/Bp型变频空调器的控制电路由室内机电路、室外机电路构成,如图6-15所示。其窒内机控制电路由电源电路、温度检测电路、显示电路、室内风扇电机驱动电路等构成,如图6-16所示。


1. 室外微处理器的引脚功能
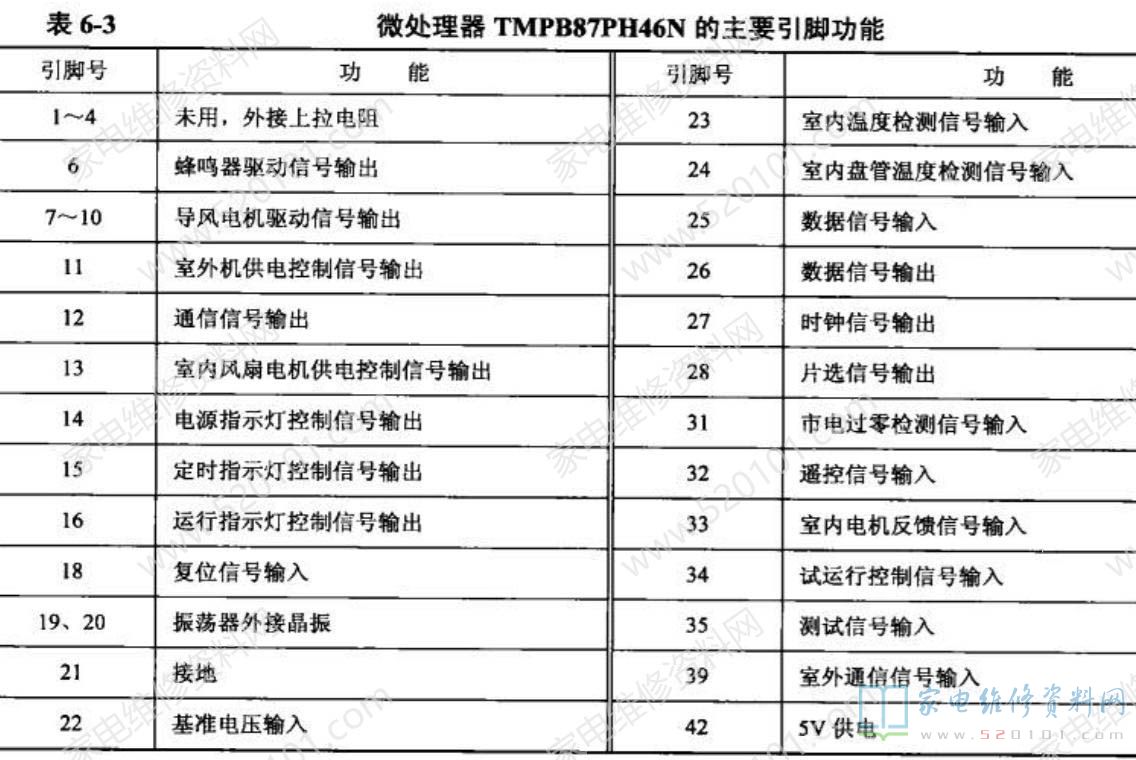
如图6-16所示,该机室内机电路板以东芝公司生产的微处理器TMPB87PH46N (IC1)为核心构成,所以它的引脚功能是分析室内机电路板工作原理和故障检修的基础。微处理器TMPB87PH46N的主要引脚功能如表6-3所示。
2. 电源电路
室内机的电源电路采用变压器降压式直流稳压电源电路,主要以变压器(图中未画出)、整流堆、滤波电器、5V稳压器RGI为核心构成。
插好空调器的电源线后,220V 市电电压通过熔断器Fc1输入,再经高频滤波电容c2滤除市电电网中的高频干扰脉冲,利用连接器CNI/CN4 输入到电源电路。市电输入回路并联的ZE1是压敏电阻,当市电电压过高时ZE1击穿短路,使Fcl过流熔断,切断市电输入回路,从而避免了电源电路的元器件过压损坏。
市电通过变压器降压,从它的次级绕组输出的10V左右(与市电电压高低成正比)交流电压通过整流堆DB1桥式整流,产生的脉动电压不仅送到市电过零检测电路,而且通过D3加到滤波电容C4两端,通过C4滤波产生12V左右的直流电压。12V 电压不仅为继电器、驱动块等电路供电,而且利用三端稳压器RG1 (7805) 稳压输出5V电压,通过C5和c9滤波后,为室内微处理器、存储器等电路供电。
3. 市电过零检测电路
市电过零检测(同步控制)电路由变压器、整流堆DB1、带阻三极管DQ1及电阻、电容等元器件组成。变压器次级绕组输出的交流电压通过DB1桥式整流产生脉动电压,再通过R10和R9限流,利用C10滤除高频干扰,经DQ1倒相放大产生100Hz交流检测信号,即同步控制信号。
该信号作为基准信号通过R31、电容排内的一个电容滤波后,加到微处理器IC1的31脚。IC1对31脚输入的信号检测后,确保室内风扇电机供电回路中的固态继电器PC1内的双向晶闸管在市电过零点处导通,从而避免了它在导通瞬间可能因过流损坏。
4. 微处理器基本工作条件电路
微处理器正常工作需具备5V供电、复位、时钟振荡正常这3个基本条件。
(1) 5V供电
插好空调器的电源线,待室内机电源电路工作后,由其输出的5V电压经电容滤波后,加到微处理器IC1 (TMPB87PH46N)的供电端42脚,为IC1供电。
(2)复位
该机的复位电路以微处理器IC1和复位芯片IC3 (PST600D)为核心构成。开机瞬间,由于5V电源电压在滤波电容的作用下逐渐升高,当该电压低于3.6V时,IC3 的输出端输出低电平电压加到IC1的18脚,使IC1内的存储器、寄存器等电路清零复位。随着5V电源电压的逐渐升高,当其超过4.6V后,它输出高电平电压,该电压加到IC1的18脚后,IC1 内部电路复位结束,开始工作。IC1正常工作后,它的18脚电位几乎与供电相同。
(3)时钟振荡
微处理器IC1得到供电后,它内部的振荡器与19、20脚外接的晶振通过振荡产生8MHz的时钟信号。该信号经分频后协调各部位的工作,并作为IC1输出各种控制信号的基准脉冲源。
5. 遥控操作
微处理器IC1的32脚是遥控信号输入端。用遥控器对该机进行温度调节等操作时,遥控接收电路将红外信号进行解码、放大后,通过R26限流,再通过电容排内的一个电容滤波后,加到IC1的17脚。IC1对17脚输入的信号进行处理后,控制相关电路进入用户所需要的工作状态。
6. 蜂鸣器电路
如图6-16所示,蜂鸣器控制电路由微处理器IC1、驱动块IC2 (BAl2003)、蜂鸣器PB1等构成。
进行遥控操作时,IC1⑥脚输出的脉冲信号加到驱动块IC2的⑦脚,经IC2⑦、10脚内部的非门倒相放大后,从它的10脚输出,加到蜂鸣器PB1的两端,驱动蜂鸣器鸣叫,表明操作信号已被IC1接收。
7.室内风扇电机电路
如图6-16所示,室内风扇电机电路由微处理器IC1、驱动块IC2 (BA12003)、固态继电器PC1、风扇电机、运行电容等构成。室内风扇电机的速度调整有手动调节和自动调节两种方式。
(1)手动调节
当用户通过遥控器降低风速时,遥控器发出的信号被微处理器IC1识别后,使其13脚输出的控制信号的占空比减小,通过驱动块IC2内的非门倒相放大后,为固态继电器PC1内的发光管提供的导通电流减小,发光管发光减弱,为双向晶闸管提供的触发电流减小,双向晶闸管导通程度减小,为室内风扇电机提供的电压减小,室内风扇电机转速下降。反之,控制过程相反。
(2)自动调节
自动调节方式有两种: 一种是PG脉冲调节方式,另一种是温度控制方式。
1) PG脉冲调节方式
室内风扇电机内部装有用于检测转速的霍尔传感器。当室内风扇电机旋转后,霍尔传感器输出端输出测速信号,即PG脉冲信号。该脉冲信号通过连接器CN7的②脚输入到室内电路板,通过R25限流、电容排内的一个电容滤波后,加到微处理器IC1的33脚。当电机的转速高时,PG脉冲的个数就升高,也就是PG脉冲的频率升高,被IC1识别后判断电机转速过高,IC1的⑧脚输出的控制信号的占空比减小,如上所述,室内风扇电机转速下降。反之,控制过程相反。
提示:若微处理器IC1的33脚没有PG脉冲输入,IC1会判断室内风扇电机异常,发出指令使该机停止工作,并通过显示屏显示故障代码。
2)温度控制方式
温度控制方式电路由微处理器IC1、室温传感器(图中未画出)、连接器CN8、延迟电容C28、R26等构成。制冷期间,当室温比设置的温度高出一定值时,室温传感器的阻值较小,5V电压通过L4、CN8、室温传感器与R27取样,产生的电压较大。该电压通过R29加到微处理器IC1的23脚,IC1将该电压与它内部存储器内存储的电压温度数据比较后,判断出室内温度较高,于是IC1的13脚输出的驱动信号的占空比增大,通过IC2倒相放大,使固态继电器PCI为室内风扇电机提供的电压达到最大,室内风扇的转速最高。室内温度随着制冷的不断进行而逐渐下降,当室温低于设置值温度一定值后, 室温传感器的阻值增大,使IC1的23脚输入电压减小,被IC1识别后,控制13脚输出的驱动信号的占空比减小,室内风扇处于中速运转状态,当室温达到设定温度后,室内风扇停转。
由于制热初期室内盘管温度较低,该温度信号被室内盘管温度传感器(热敏电阻)检测后,它的阻值较大,使微处理器IC1的24脚输入的电压较小,致使IC1的13脚输出的驱动信号的占空比较小,室内风扇转速较低,以免为室内吹冷风,待室内热交换器的温度达到一定高度时,IC1再通过控制供电电路来提高室内风扇的转速。
8.导风电机控制
如图6-16所示,由于该机的导风电机采用的是步进电机,所以不仅要求微处理器IC1利用42脚输出激励脉冲信号,而且还采用了7非门芯片BA12003 ( 同ULN2003)作驱动器。
在导风电机停止状态下,需要使导风电机工作时,微处理器IC1的⑦~10脚输出导风电机驱动信号。该驱动信号从驱动块IC2的⑥~③脚输入,利用它内部的非门倒相放大后,从IC2的11~14脚输出,再经连接器CN9的②~⑤脚输出到导风电机的绕组端子上,使导风电机旋转,实现导风控制。
网友评论