1.防撞传感器(超声波测距传感器)
扫地机器人内部安装有超声波测距传感器,用来检测扫地机器人行进路线上是否有障碍物。超声波测距传感器安装位置如1所示。
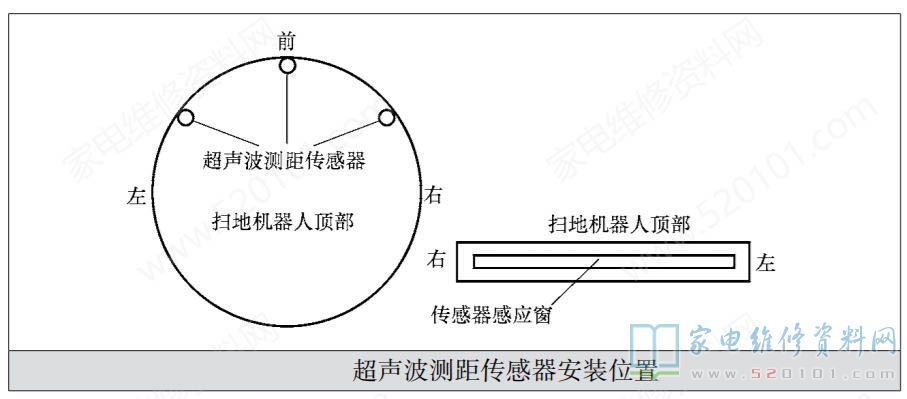
超声波传感器原理:是根据测量发射波与反射波之间的时间间隔,从而达到测量距离的作用。例如,检测出前方有障碍物时,通过超声波测量与其距离,当测量距离小于限定值时向控制器发送信号(根据信号的幅值大小,也可以初步确定障碍物的大小),控制器控制扫地机器人进行转向,避免与家具等物品发生碰撞,从而避免损坏相应物品。
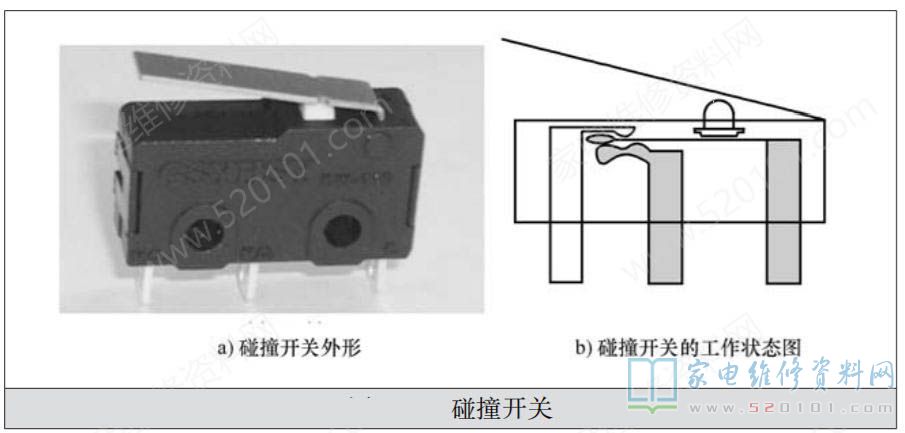
提示:在实际的调试过程中,由于超声波传感器间存在测量上的盲区,因此在机器人前端设计了碰撞传感器,即在碰撞板左右两侧各装有一个微动开关(如图2所示),在没有碰撞物时传感器向单片机发出的是高电平信号,移动机器人在前方发生碰撞时,会引起左右开关的响应并传送低电平信号给控制器,从而控制机器人做出相应反应动作。微动开关( 碰撞开关)的工作原理非常简单,完全依靠内部的机械结构来完成电路的导通和中断,当开关的外部探测臂受到碰撞,探测臂受力下压,带动碰撞开关内部的簧片拨动,从而电路的导通状态发生改变。
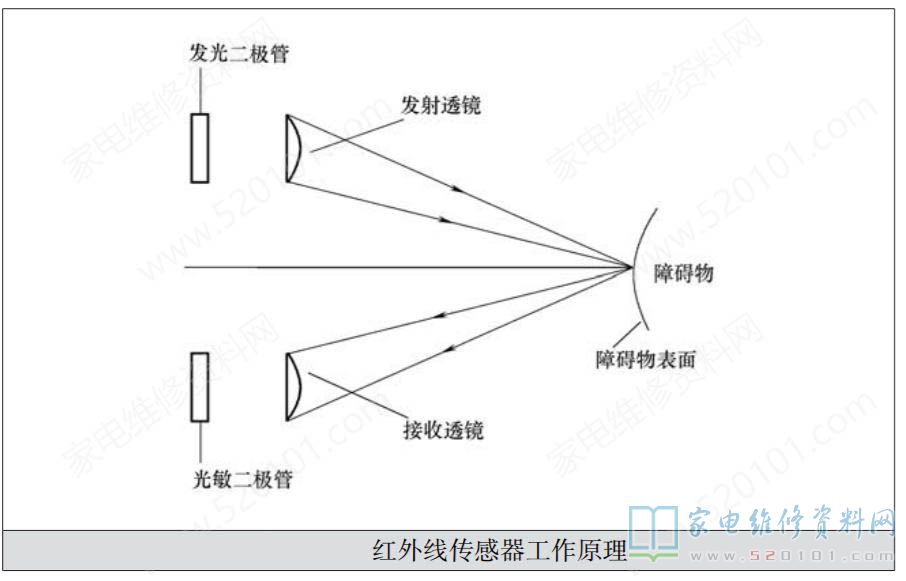
一般扫地机器人通过安装在不同部位(分别安装在扫地机器人的正前方和左右两边)的多个红外传感器(如图3所示)来“发现”行驶线路上的阻挡物,避免发生碰撞。对机器人控制使用红外传感器,由发光元件发出红外线,用接收元件通过检测其反射光判定是否有障碍物。

红外线传感器工作原理如图4所示,对发光元件使用红外线LED,作为接收元件使用光敏二极管( 或光电晶体管)。由红外发光管发射经过调制的信号,红外光敏管接收目标物反射的红外调制信号,环境红外光干扰的消除由信号调制和专用红外滤光片保证。在相邻的红外线传感器间存在测量盲区,因此,在扫地机器人的前端设计了约180°的碰撞板,在碰撞板左右两侧各装有一个光电开关。
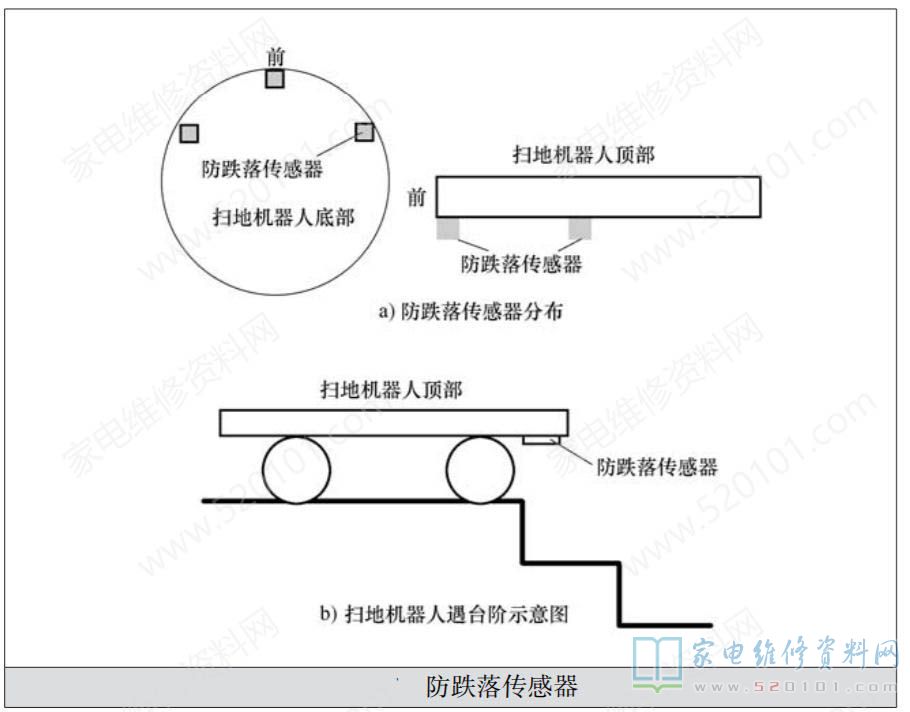
3.防跌落传感器(超声波测距传感器)
在扫地机器人背面安装防跌落传感器,用来防止扫地机器人遇到台阶时跌落(如图5所示)。防跌落传感器也是利用超声波进行测距。当扫地机器人行进至台阶边缘时,防跌落传感器利用超声波测得扫地机器人与地面之间的距离,当超过限定值时,向控制器发送信号,控制器控制扫地机器人进行转向,改变扫地机器人前进方向,从而实现防止跌落的目的。
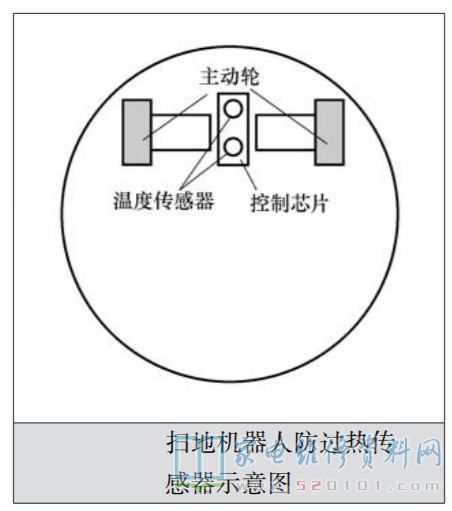
4.防过热传感器(温度传感器)
扫地机器人在电路板上安装了温度传感器( 如图6所示),其作用是防止扫地机器人持续工作导致电动机过热,从而导致电路的烧毁。当扫地机器人工作一段时间电动机温度达到一定限度后,-一个温度传感器发送信号给控制器,控制器再控制扫地机器人停止工作,此时散热风扇开始工作;当温度降到-定程度后,另一个温度传感器发送信号给控制器,控制器再控制扫地机器人继续工作。
5.低电量自动返回充电功能(红外线传感器)
扫地机器人所带电池容量有限,所以就需要在电量低时自动返回充电基座进行充电再返回原位置继续打扫。在扫地机器人的充电基座与内部安装红外线传感器来实现低电量自动返回充电。
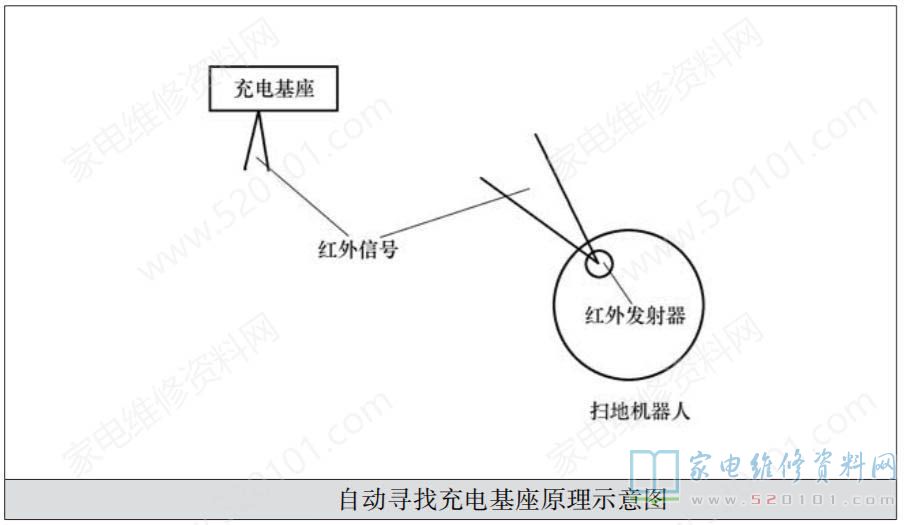
扫地机器人自动充电的工作原理(如图7所示),当扫地机器人检测到电池电量低于限定值时,扫地机器人上的红外发射装置在控制器的控制下会发射一个传播距离较远并且覆盖角度较窄的红外信号,用于搜寻充电基座的位置,同时扫地机器人向充电基座发送信号;充电基座接收到扫地机器人发射的信号后,基座上的红外发射装置发射一个传播距离近且覆盖角度窄的红外信号;扫地机器人内部的红外线传感器接收到后会向控制器发送信号,控制器就会控制扫地机器人按照接收到红外线的方向找到充电基座,并自动返回进行充电。
提示:在搜寻充电基座位置时,扫地机器人先缓慢地原地旋转。在扫地机器人旋转过程中,当充电基座接收到扫地机器人发射的红外信号时,充电基座向扫地机器人发送信号,扫地机器人接收到信号后停止旋转,并按照此方向行进。当扫地机器人行进到充电基座附近时,利用充电基座发出的红外信号精确地与充电基座进行对接,完成自动对接充电。
6. 光电编码器(光电传感器)
光电编码器是扫地机器人上的位置和速度检测的传感器,用于测速和计算里程,它是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的器件。光电编码器由光栅盘(又称码盘,它与电动机同轴固定,电动机旋转时,光栅盘与电动机同速旋转)、发光器、光电检测和整形电路4部分构成。
光电编码器裝在前随动轮上,与随动轮同轴,光电编码器通过减速器和驱动轮的驱动电动机同轴相连,并以增量式编码的方式记录驱动电动机旋转角度对应的脉冲。由于光电编码器和驱动轮同步旋转,利用码盘、减速器、电动机和驱动轮之间的物理参数,可将检测到的脉冲数转换成驱动轮旋转的角度,即机器人相对于某一参考点的瞬时位置,这就是所谓的里程计。光电编码器已经成为在电动机驱动内部、轮轴,或在操纵机构上测量角速度和位置的最普遍的装置。
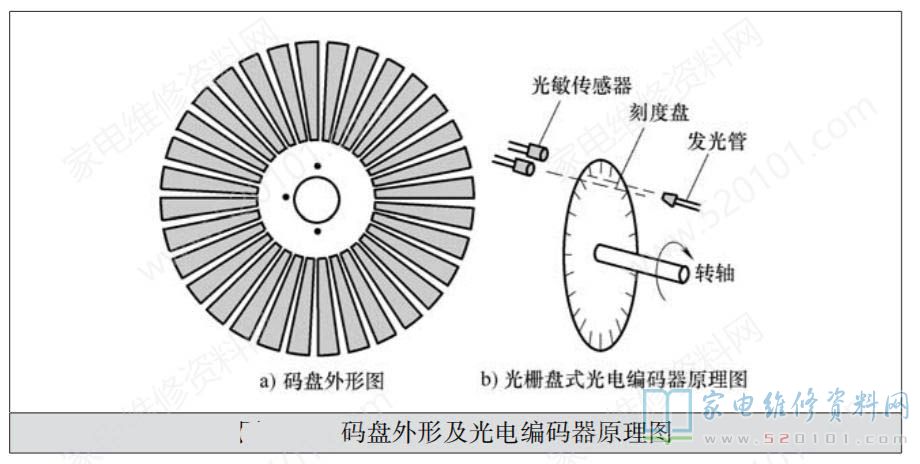
光电编码器也有很多种,但比较常见有反射式和透射式两种,从本质_上来说,两种传感器都属于光电传感器。反射式的基本结构是在电动机的旋转轴上加一个圆形的黑白相间码盘,离码盘很近的地方固定一个红外发射/接收一体模块,利用黑白色对红外线的吸收率不同来进行判断;当码盘随电动机旋转时,红外接收端的输出信号便是一个由旋转速度决定频率的方波,进而便可知道此时电动机的旋转速度。透射式检测原理与反射式相似,唯--的不同是它没有黑白相间的码盘,而是在光栅圆盘上开了-圈小孔,红外线或可见光的发射端与检测端分别位于光栅圆盘的两侧,同样利用光栅圆盘旋转后产生的脉冲信号来检测电动机的旋转速度。如图8所示为码盘外形及光电编码器原理图。
7.电子罗盘
电子罗盘是利用地磁场,检测电子罗盘模块相对于地磁场方向的偏转角度的传感器。扫地机器人的转向需要电子罗盘进行指引,在转向过程中电子罗盘能将检测到的方向角以脉冲的方式发出,通过单片机进行判断来完成预期的转向目的。
电子罗盘模块由磁性传感器及驱动芯片组成,磁性传感器里面包含一个LR振荡电路,当磁性传感器与地球磁感线平行方向夹角发生变化时,LR振荡电路的磁感应系数也会发生变化。驱动芯片通过磁性传感器磁感应系数的变化可以计算出磁性传感器与地球磁感线之间的夹角,驱动芯片可以连接三个磁性传感器,这三个磁性传感器方向互为垂直,这样就可以测量在三维方向上与地球磁感线的夹角,从而得到当前的三维方向。电子指南针模组只要得到水平方向与地球磁感线的夹角就可以测得方向。
8.陀螺仪
陀螺仪是用来测量运动物体的角度、角速度和角加速度的传感器。利用陀螺可以测量运动物体的姿态角,精确测量其角速度,它能够有效解决电子罗盘受到电磁千扰以及光电编码器受到轮子打滑等不确定因素造成的角度测量不准方面。根据不同的物理学原理可以制造出不同类型的陀螺,一般可以划分为机械陀螺、压电陀螺、光学陀螺等几类。
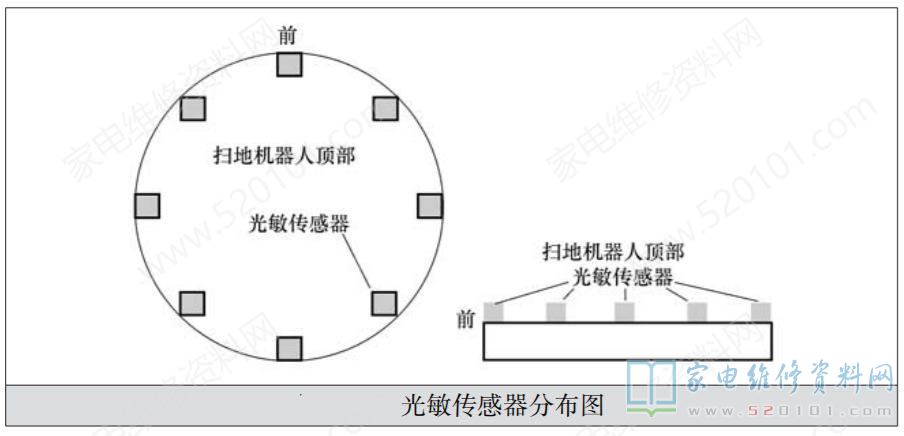
9.深度清扫传感器(光敏传感器)
深度清扫就是对于比较脏的地方( 如床底、沙发底等地方)需要重点清扫,以保证清洁度,为实现此功能,在扫地机器人正面安装了几个光敏传感器,当机器进人比较脏的地方时,光敏传感器接收到的光强发生变化,向控制器发送信号,控制器发出控制信号,使扫地机器人转向,重新回到暗处,继续进行清扫。如图9所示为光敏传感器分布图。
10.灰度传感器
灰度传感器是模拟传感器,主要用于检测不同颜色的灰度值,它是利用光敏电阻对不同颜色的检测面对光的反射程度不同,其阻值变化的原理进行颜色深浅检测。灰度传感器由一只发光二极管和一只光敏电阻组成(如图10所示),安装在机器人底部离地面较近的一个位置( 安装在同一面上)。发光装置发射可见光,照射到不同颜色上面后,反射光的强度会有一定的差异,根据光敏电阻的返回值便可知道机器人下方的地面颜色。
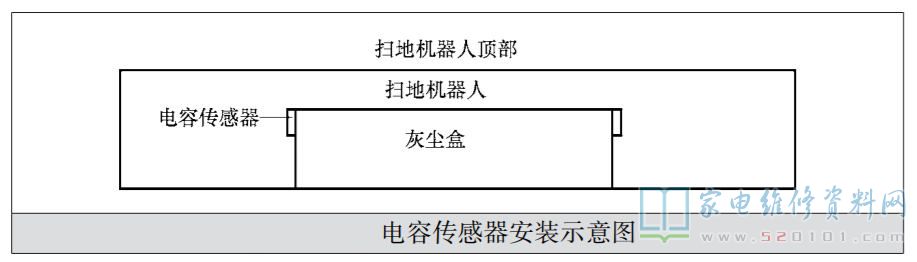
11.灰尘盒防满传感器
灰尘盒防满传感器是在灰尘盒两侧安装变介质型电容传感器,其作用是检查扫地机器人灰尘盒中的灰尘是否装满。若灰尘盒中灰尘高度到达电容传感器高度时,电容传感器中的介质发生改变(由于灰尘的介电常数与空气的介电常数不同),从而引起传感器电容变化,传感器将信号传给控制器,控制器控制扫地机器人发出报警信号,提示灰尘盒已装满。电容传感器安装示意图如图11所示。
网友评论